
My teammate, Jill Swan, and I experimented with three power settings for the motors, keeping both motors the same. We did three trials per power setting. The results are as follows:
Wheel Diameter= .055 m Circumference= .1728 m
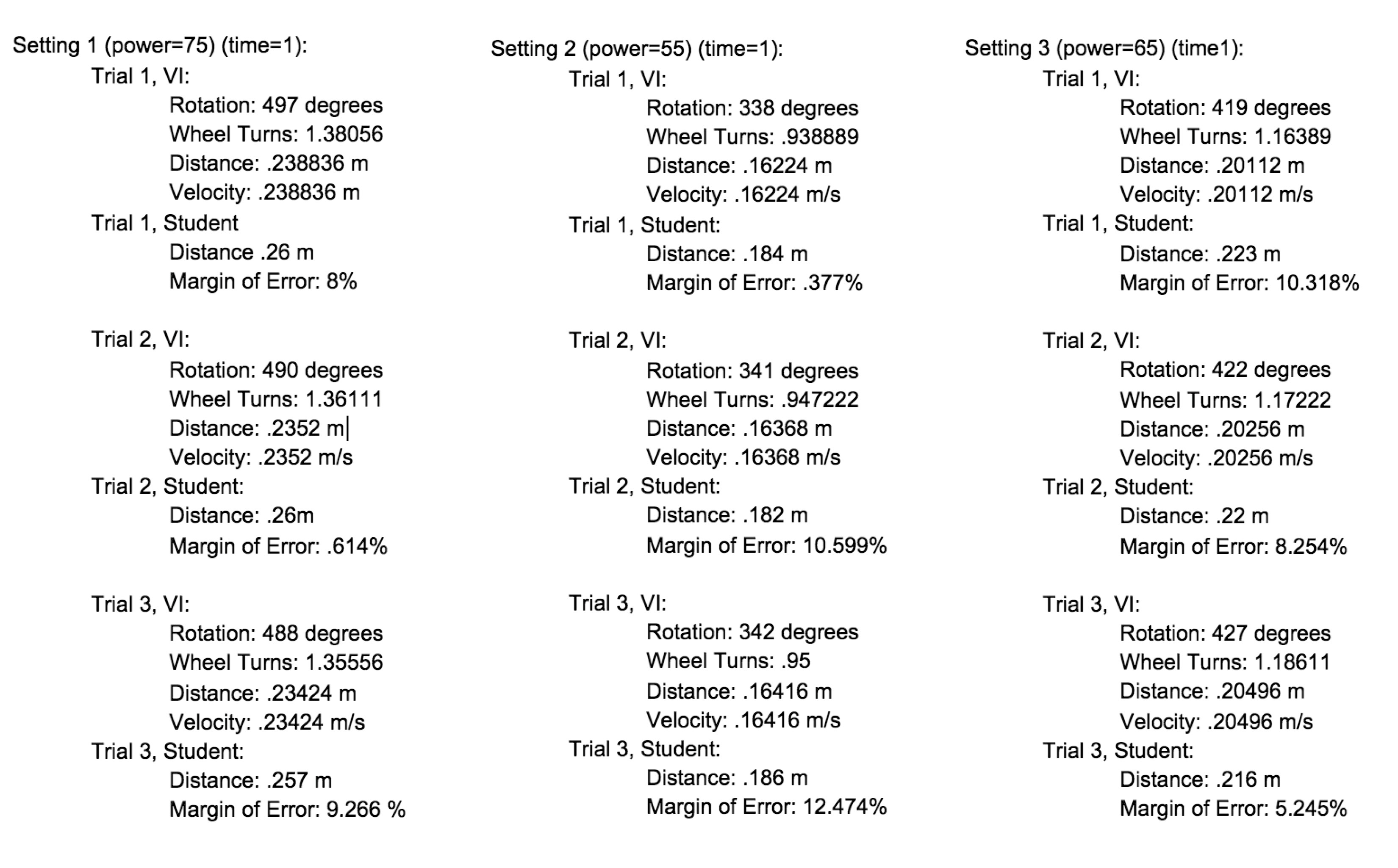
The experiments show that the more power the motors had, the farther the robots went. In order to make a full rotation, the power needs to be over 55, as our experiments show that 55 just slightly not enough for an entire 360 degree rotation. The margin of error varied across all the studies anywhere from less than a percent to 12% error with no definitive link between the variation of results. The experience was helpful to reinforce the concepts of distance, velocity, and dealing with diameter, radius, and circumference from the lecture. It also was beneficial in learning to work with the robots and the computer software associated with them.