On Friday, January 31st, our class completed the second task with our Lego Robots. For this task, we had to measure the distance of our Robot’s travel and compare it to the LabView statistics, thus calculating our percentage error. Although we had to do less work in LabView, and focus more on our actual Robot and measuring the distance it traveled with a ruler.
When I initially saw what we had to do, I panicked. As I have mentioned before, anything that involves numbers or calculations is utterly terrifying to me. I hadn’t even used a ruler since middle school. Luckily, I got over my fear and jumped head on into the assignment. After Professor Sonek explained in detail the steps we would have to take in order to complete this activity, I felt more assured. The program on LabView was already set up for us, so we just had to type in the time and power of the robot. The Program looked something like this:
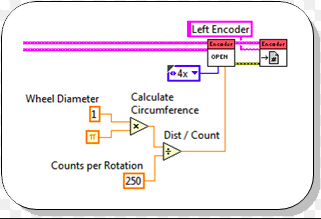
As you can see, the area where we had to enter the power and time made the whole thing much less complicated as it was already set up for us.
We also had to use a ruler to measure it’s distance. That part was a bit hard at first as it was a difficult process that you had to really pay attention to in order to get the correct measurements. We had to redo our measurements many times due to inexact measurements. That process, which we did by hand in front of our computers, looked something like this:

Our group did not use paper or a marker to get a more accurate reading, which would have been very helpful. We used only our fingers, a ruler, and our own perception. Perhaps next time we can implement this method to prevent any inaccuracies. It looks like it would save a lot of time and frustration.
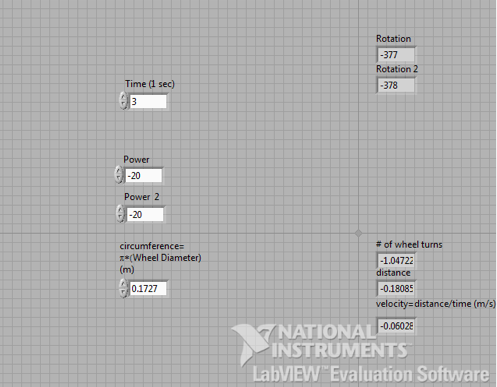
Then, we had to compare our measured to distance to the distance calculated by LabView. My partner and I recorded our own measurements next to those of LabView in our notebooks. LabView measured the number of wheel turns, distance, velocity while we measured merely the Robots distance in centimeters, which we had to convert to meters. My recordings, which were a bit unorganized looked like this:

We had to do the experiment three different times, each time using a different level of power and testing that level three times as well. The Formula we were given to calculate our percentage errors was:
[Distance(m)-Distance(LV)/(Dis(m)+Dis(LV)/2)]
In this equation (m) stands for the distanced we measured with the ruler and (LV) stands for LabViews measurements. I tried doing the equation out by hand a few times but kept getting it wrong. Like I said, I’m not good with numbers. Luckily, my partner knew how to use excel and put our calculations and the formula in to be calculated by excel. Our end result looked like this:
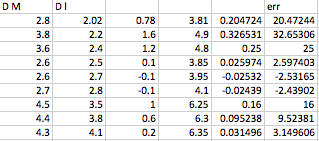
The last column represents our error percentages, which after comparing with other groups seemed off. We tried a few different things to get more accurate results, but ran out of class time. We are hoping to fix this next class.
Overall, I am proud of my completion of this activity, even if the numbers were off. I understood what we needed to do, and most of what we were doing while we were doing it. I even sharpened up on my math skills and learned how to better use excel.
Until next class, folks!

I know many people share your uneasiness with numbers and calculations – myself included. But well done for your efforts! 😀
cant wait for the next class! thanks!