Force, Mass and Acceleration
On Feb 5th, 2016, my teammate Daniela Galindo and I performed the pulley lab activity together using Lego robots. Our goals of the experiment was to study and understand the relationships between acceleration and mass with a fixed force, and between acceleration and force with a fixed mass. And most importantly, to explore the Newton’s Second Law of Motion, i.e. Force=mass x acceleration(F=ma).
We began the experiment by installing the battery of the robot, and connected it with the pulley and computer. Then we measured the height of the pulley from the base to the top using a ruler, which was 33 centimeters. After that, we launched the file provided by our instructor on the Labview, and we actually performed the experiment based on two different scenarios.

In the first scenario, we set the power on the program to be 60, and had the pulley to lift mass of 0.24kg object for 33 centimeters . We recorded time and acceleration from the computer, and then we repeat the experiment four more times using mass of 0.2kg, 0.15kg,0.1kg and 0.05kg. Following are the data and graph constructed for Scenario One.


We were expecting the acceleration to be varied with mass when we had the fixed amount of power. The data above shows the fact clearly, for examples, when mass is 0.24kg, acceleration is 18.2436 rpm/s, and when mass is 0.2kg, acceleration is 22.6958 rpm/s . Also, from the graph, after displaying the horizontal axis to be the mass and the vertical axis to be the acceleration. We see the red straight line on the graph indicating an inverse relationship between acceleration and mass. Namely, as the mass of the lifted objects increases, the acceleration decreases.
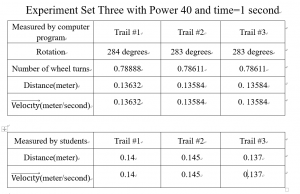
On the other hand, we did the scenario two with power levels of 50, 60, 66, 75 and 90, while had the pulley lifting a fixed amount of 0.24kg objects for all of the difference power levels. And here are the data and graph for the scenario two.

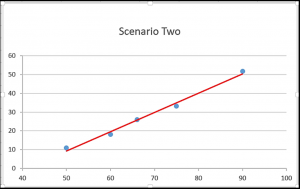
In the scenario two, we again got the result as we expected. The accelerations varied as we changed the level of powers, and we could see the results from the data as well. Furthermore, I displayed five difference power levels on the horizontal axis along with five difference accelerations on the vertical axis. And on the graph, we see as the value of the power increases, the acceleration also increases. Also, the red straight line on the graph indicates a positive linear relationship between accelerations and powers.
In conclusion, we concluded the force is indeed a function of mass and acceleration since two scenarios both supported the it. And the Newton’s second Law of Motion is true from the results of the experiment.
 As we can see from the photo, electric power is generated at power plants and then moved by transmission lines to substations. A local distribution system of smaller, lower-voltage transmission lines moves power from substations to the customers.
As we can see from the photo, electric power is generated at power plants and then moved by transmission lines to substations. A local distribution system of smaller, lower-voltage transmission lines moves power from substations to the customers.
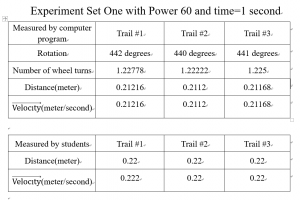 % of error of trail#1=(0.22-0.21216)/[(0.22+0.21216)/2] X 100% = 3.6283%
% of error of trail#1=(0.22-0.21216)/[(0.22+0.21216)/2] X 100% = 3.6283%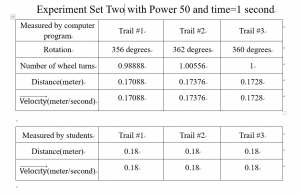

Recent Comments