Solar Energy

Solar energy is radiant light and heat from the Sun harnessed using a range of ever-evolving technologies such as solar heating, photovoltaics, solar thermal energy, solar architecture and artificial photosynthesis. As now we care more about our planet, and CO2 emission, our society is progressive towards energy independence from fossil fuels and instead are accessing energy through wind, solar, geothermal and wave energy. And according to the International Energy Agency, by 2050 the sun could well be the world’s biggest source of electricity.

In 2015, the U.S. solar industry installed 7,286 megawatts of solar power in 2015, which increase of over 1,000 megawatts of solar photovoltaic installations compared to 2014. One of the leader of America’s leaders in renewable energy is Prologis, You may not know about Prologis, which at 97.54 megawatts trails only Walmart in the amount of installed rooftop solar capacity in the U.S. Despite the low profile of its buildings and its brand, Prologis is the world’s largest owner and operator of warehouses, with a portfolio of thousands of nondescript one- and two-story buildings around the world. Boasting 700 million square feet of space in 21 countries. In order to make use of their idle rooftop of storages, they install solar panel on them, and generate energy for daily operating use. They also sell excess energy to the energy supplier, which create another way of making money for their company. To date, Prologis has put solar panels on more than 100 buildings around the world, with a combined capacity of 140 megawatts. The company plans to add about 15 megawatts of solar capacity per year through 2020—a growth rate of about 10 percent annually.
The idea of installing solar panel to rooftop is not very new, and the only thing that matters is the scale. With so many warehouses Prologis have, Prologis has put itself on top of the game, and find a way of making money with their idle rooftops.

The problem with renewables is that we are never guaranteed a constant supply of sunshine, wind or wave power. NextPV, an International Joint Laboratory between France’s National Center for Scientific Research (CNRS) and the University of Tokyo come out a idea of harnessing solar energy by placing solar panels on balloons and sending them above the clouds. For which, Jean-Francois Guillemoles, senior researcher at the CNRS predicts the solar panels can get five times more energy in the upper air. According to the project, the solar balloon would be able to produce electricity during the day, with a battery continuing to generate electricity at night.
I see a future on installing solar panels on balloons, because a lot of technology is already available. And I believe NextPV will figure it out soon, and provide our society a new way of getting solar energy.
Resource:
http://www.cnbc.com/2016/01/14/harvesting-solar-6km-in-the-air.html
http://www.cnbc.com/2016/02/22/us-has-a-record-breaking-year-for-solar-power.html
http://www.slate.com/articles/business/the_juice/2016/01/prologis_which_runs_warehouses_is_a_huge_leader_is_solar_energy_huh.html







 As we can see from the photo, electric power is generated at power plants and then moved by transmission lines to substations. A local distribution system of smaller, lower-voltage transmission lines moves power from substations to the customers.
As we can see from the photo, electric power is generated at power plants and then moved by transmission lines to substations. A local distribution system of smaller, lower-voltage transmission lines moves power from substations to the customers.
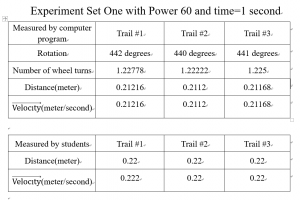 % of error of trail#1=(0.22-0.21216)/[(0.22+0.21216)/2] X 100% = 3.6283%
% of error of trail#1=(0.22-0.21216)/[(0.22+0.21216)/2] X 100% = 3.6283%
Recent Comments