Since our group had technical issues during the experiment so that we couldn’t finish the lab successfully. However, we recorded one 30 second perfectly, but only got the power for the first five seconds, and the power was approximately equals to 0.074. If we can to do this experiment again I would compare the bigger amount of data that we recorded from multiple times. Once we had enough data we could graph it and explain more in depth about why less shakes generates less power and more movement would caused more voltages. The graph of this experiment would be really interesting since the shape of the graph is under controlled by our own frequency of shaking.
Monthly Archives: March 2015
Solar Energy
Solar power in China is a growing industry with over 400 photovoltaic companies. China was the world’s leading installer of solar photovoltaics in 2013, adding a record of 11.3 gigawatts of capacity.

China has been the world’s largest manufacturer of solar panels since 2008. Industry estimates that by the end of 2017, China will have enough manufacturing capacity to produce 51 gigawatts of photovoltaics per year, an amount over twice as large as 2010’s global production rate.

Japan has been expanding its solar power since the late 1990s, where as China is a big manufacturer, Japan has been a large consumer. Japan was the world’s 2nd largest market for solar power in 2013.
Check the following image of Komekurayama solar power plant:



Space-based solar power:
Not only can we harvest the power on the Earth, we can also harvest solar power in the space. This greatly increases the area of power we can collect. The project has been in research since the early 1970s.
By putting the solar power plant in the space the plant can double its production easily, because there’s no night time in the space, the orbiting plant can always face the sun. The problems with this project are mainly the cost and the ways of transmitting the power generated back to the Earth. Radiation and micrometeoroid could also damage the orbiting plant.


The solar cell phone charger use solar panels to charge cell phone batteries. These can be a mobile power plant since they are small and easy to transport. They provide a great alternative when electric outlets are not around but sun is right above you. These solar chargers have been integrated into cell phone cases that can charge the phone directly whenever there’s light, hence the phone will never need to be charged from wall outlets.
http://www.earth-policy.org/datacenter/xls/indicator12_2014_2.xlsx
http://www.iea-pvps.org/index.php?id=1&eID=dam_frontend_push&docID=1236
http://www.12voltsolarpanels.net/charge-your-cell-phone
http://www.go-green-solar-energy.com/portable-solar-power.html
http://www.sciencemag.org/cgi/reprint/162/3856/857.pdf
Nicola Tesla
Tesla was a Serbian American who moved to the United States in 1884 to work for Thomas Edison in New York City. He is most famous for his break through in the production, transmission and application of electric power.

Tesla performed the first experiments in wireless power transmission in 20th century. The experiment involved spark-excited radio frequency resonant transformers (which is later called Tesla coil), and it generated high AC voltages on elevated capacitive terminals, which marked the successful wireless power transmission for the first time. Later he found that he could increase the transmission distance by using a receiving LC circuit (an electric circuit consisting of an inductor, and a capacitor) tuned to resonance with the transmitter’s LC circuit. The experiment gave a good range of wireless power transmission, about 30 meters, and the resonant inductive coupling which Tesla used is now further developed and utilized in mobile devices’ wireless charging system that we see today. This near-field wireless power transmission did not satisfy Tesla, he was more obsessed with long range wireless power transmission and thought that transmitting wireless power on a global scale was feasible. He believed that he could conduct the Earth and the atmosphere to transfer the energy. Tesla stated he could use balloon to suspend transmitting and receiving terminals in air at about 9,100 meters altitude, due to its low pressure. He claimed at this altitude an ionized layer would allow electricity to be sent at high voltages over long distances.
Tesla had more than 100 patents registered, and these patents support him well financially, so he was able to fund his other science projects.
In today’s world we have wireless charging ability in many mobile devices. It uses an electromagnetic field to transfer energy between 2 objects. This technology is called inductive charging, and it works by powering a primary coil (usually in the charging station) to charge a secondary coil (usually in the device that’s being charged). The two induction coils combined is called an electrical transformer. When resonant inductive coupling is used the transfer distance can be increased. Wireless charging has many advantages over traditional charging, it provides protected connection so no wires would get corroded over long periods of time. It also provides better safety for medical implants. Although wireless charging has lower efficiency and takes more charging time, the technology itself will get better and better in the future.
Tesla has made important changes in the technology these days, and many wireless technology is based on his previous work and experiments. The famous motor company is named after him to celebrate his success in electric power innovation.
References:
http://books.google.ca/books?id=PW06qF-dj2IC&printsec=frontcover#v=onepage&q&f=false
http://news.bbc.co.uk/2/hi/europe/5167054.stm
The First Lego Robot Activity
In this experiment, we tested our robot at three different power levels. We started with 75 power then 50 and final 25 power and did three times for each level. The 75 power we gave the robot 1 second of power. The 50 and 25 power runs we gave the robot 2 seconds of power. With the data we recorded, then we calculated the velocity and the error percentage for each run. We used a ruler to measure the distance the robot has been travelled.

Even though we tried to reduce the error percentage, we still can not do as perfect as the computer does. The data we got for the error percentage is between 0% to 7%. Error percentages come from the relationship between the Labview measurement and the physical measurement. We recorded when the program is recording. The closer these two measurements are, the lower the error percentage. These errors could have happened because of the ruler can be moved by the robot when its moved or the robot not traveling in a straight line, which would shorten its distance on the ruler. The lego robot activity showed that little adjustments to variables can change the data entirely, which can increase the error percentage.
Iceland’s use of geothermal energy
Iceland sits on top of two different ridges with earth surface plate aparting from each other at a rate of 2 centimeter a year. Iceland sits on top of many volcanoes because of that, and these volcanoes erupts once every 4 years. This causes Iceland consists of rupture land with different temperature, some provide warm water, and some are even hot enough to provide direct steam. The geothermal exchange is a consistent exchange of heat from ground water (cold) to underground water (hot).

Iceland harvests the steam to drive turbines, which generates electricity of the entire island. Harvesting geothermal energy has many advantages over traditional power plant options:
- Emission free
- Zero carbon
- No fuel required (no input source needed)
- More reliable than solar energy (only works in day time) and wind energy (subject to season changes)
- Smallest land footprint
- Almost limitless supply
- Simple and reliable

Iceland’s geothermal energy plant produces 25% of its total electricity production. 40% of the geothermal energy is used for producing electricity, 43% is used for space heating, and the rest are used on various subjects that require direct heat. See chart down below:

https://www.youtube.com/watch?v=Rs6n0baLQ6w
Peltier Device
The Peltier effect is the presence of heating or cooling at an electrified junction of two different conductors. A small Peltier device can usually be found in a hot & cold water dispenser. Peltier device works by transferring heat from one side to another, in which the action is reversible. The effect is one of the thermoelectric effect, when a current is flow through a junction between conductor A and conductor B, heat may be generated, or removed at the junction. The heat generated at junction per unit time is equal to:

Where () is the Peltier coefficient of both conductors, and I is the current flowing through.


The effect may only has 2% efficiency in practice (up to 5% in theory), so at this stage cooling or heating objects from electricity is still sub-optimal and can waste a lot of energy. See references down below.
References:
http://www.eng.fsu.edu/~dommelen/quantum/style_a/nt_pelt.html
http://rimstar.org/science_electronics_projects/peltier_effect_module_cooling_efficiency_test.htm
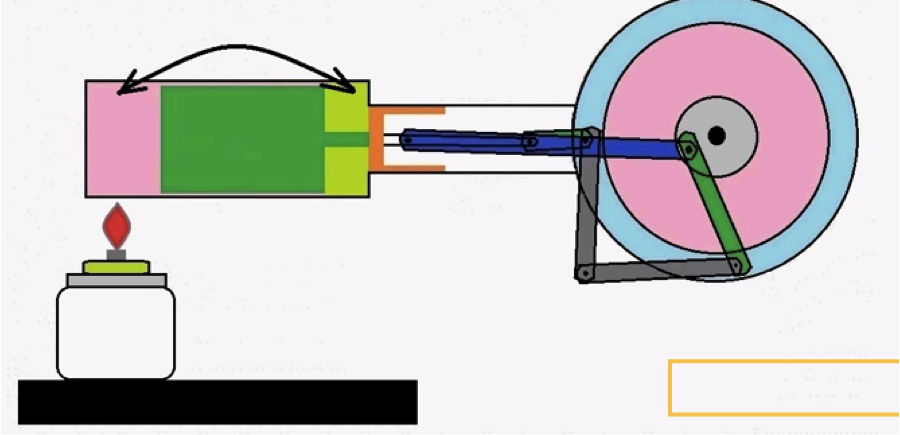
Stirling Heat Engine
The Stirling Heat Engine is a heat engine that functions when enough heat is supply as a source to the engine. Robert Stirling invented the engine in 1816. The source can be anything from solar energy, chemical energy, to nuclear energy. The Stirling Engine operates by cyclic compression and expansion of any gas particles (including Noble gas). It relies on the principle of thermal expansion, that gas particles expands (isothermal expansion) when heated and compresses (isothermal compression) when cooled.
Engine operates by cyclic compression and expansion of any gas particles (including Noble gas). It relies on the principle of thermal expansion, that gas particles expands (isothermal expansion) when heated and compresses (isothermal compression) when cooled.
The engine itself composes of a cylinder, a displacer piston (green), a power piston (orange), and a flywheel (rotating disc on the right). The displacer piston consists of about one third the volume of the cylinder. Working gas resides on both side of the displacer piston, and during the operation of the engine both sides always consist gases of different temperature. There is a slight gap between the displacer piston and the cylinder, so gases can exchange freely by pulling or pushing the power piston. When heat is supplied to the bottom part of the cylinder, the bottom portion of the cylinder heats up, causing the gas in that portion to expand, thus pushes the cylinder upwards. Cold air thus slips through the gap and enters the bottom portion of the cylinder; in exchange the hot air goes upwards and enters the rear portion of the cylinder. At this point the displacer piston moves down because cold air now resides at the bottom of the cylinder, this marks as a completion of one cycle. The next cycle begins when the bottom potion air heats up again and pushes the displacer piston upwards.
The Stirling Heat Engine in practice achieves the highest thermal efficiency among all heat engines. The engine does not require much maintenance; it is more reliable and quite when compared to internal combustion engines. Due to the nature of the engine the engine has a low power output, to increase the power output the engine needs to hold up more working fluid (gas), causing the increase to the size of the engine, as well as its production cost.
In modern world application, as the gas prices rises up quickly and people focus more and more about clean and green energy, more people are starting to pay attention to Sirling Engine. Although due to its high production cost and low power output it is not widely adopted by power plants, the engine has a wide use in submarines or space shuttles because of its reliability and quiet operation.
References:
http://www.bekkoame.ne.jp/~khirata/academic/kiriki/begin/general.html
Solar Cell Lab
In this experiment, my partner and I was using a solar cell, voltage probe, NXT with light sensor, NXT adaptor, a flashlight to see the voltages and light intensity under our different colored filters. We tried 0 distance up to 4 inches, and with different colored filter. Each trial take thirty seconds and we averaged the numbers to get the voltage. After we collected the data on the computer, this is the graph that could possibly explain our results.


According to the graph, it’s obvious to realize that the lighter tones colored is easier to come through the filter and it’s more capable to receive more voltage in the solar cell. However, I couldn’t explain why does the 0 distance and 0 light could received that much voltage. It might because of the solar cell is not in a 100% dark space, the light in the classroom might received in the solar cell and caused voltage happened.
The Pulley lab
The purpose of the pulley lab is to find the relationship between force, mass, acceleration and time. We used a lego motor, a stand, string, some adjustable weight. This is the data we recorded during the process of the experiment.

According to the data we can tell that higher power level would cause higher acceleration, and of course with higher speed. And usually it takes shorter times compares to the lower power level with lower acceleration. The only thing I’m not fully understand was the relationship between acceleration and time. I realize the shorter the time spent pulling the weight the higher the acceleration was. I’m not entirely understand the connection between time and acceleration.